Coordinate systems other that Cartesian coordinate system sometimes can be more useful in some cases.
Plane Polar Coordinate System
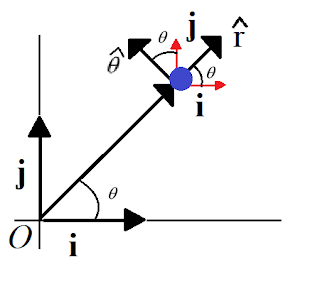
The unit vectors for plane polar coordinate system are
\begin{align}
\hat{r} &= \cos\theta\hat{i} + \sin\theta\hat{j}\\
\hat{\theta} &= -\sin\theta\hat{i} + \cos\theta\hat{j} \\
\end{align}
As they depend on \(\theta\), which may not be constant, they may have non-zero derivative, unlike the \(\hat{i}\) and \(\hat{j}\) in Cartesian coordinate system
\begin{align}
\dot{\hat{r}} &= -\dot{\theta}\sin\theta\hat{i} + \dot{\theta}\cos\theta\hat{j} = \dot{\theta}\hat{\theta} \\
\dot{\hat{\theta}} &= -\dot{\theta}\cos\theta\hat{i} - \dot{\theta}\sin\theta\hat{j} = -\dot{\theta}\hat{r}\\
\end{align}
The position vector \(\textbf{r}(t)\) is given by
$$\textbf{r}(t) = r(t)\hat{r}$$
The velocity is
$$\textbf{v}(t) = r(t)\dot{\hat{r}} + \dot{r}(t)\hat{r} = \dot{r}\hat{r} + r\dot{\theta}\hat{\theta}$$
The acceleration is
\begin{align}
\textbf{a}(t) &= \ddot{r}\hat{r} + \dot{r}\dot{\theta}\hat{\theta} + (r\ddot{\theta} + \dot{r}\dot{\theta})\hat{\theta} + r\dot{\theta}(-\dot{\theta}\hat{r})\\
&= (\ddot{r} - r\dot{\theta}^2)\hat{r} + (2\dot{r}\dot{\theta} + r\ddot{\theta})\hat{\theta}
\end{align}
Example
A particle travels at constant speed with a plane polar coordinates defined by
$$r(t)=k(1+\cos\theta(t)).$$
The particle is at \(\theta=0\) at \(t=0\). Find \(\theta\) as a function of \(t\).
Solution:
\begin{align}
\dot{r} &= k\dot{\theta}\sin\theta\\
v_0 &= \sqrt{\dot{r}^2+(r\dot{\theta})^2}\\
&= \sqrt{(k\dot{\theta}\sin\theta)^2+(k\dot{\theta}(1+\cos\theta))^2}\\
&= k\dot{\theta}\sqrt{2+2\cos\theta}\\
&= 2k\dot{\theta}\cos\frac{\theta}{2}\\
\int v_0dt &= \int 2k\cos\frac{\theta}{2}d\theta\\
v_0t&=4k\sin\frac{\theta}{2}+C,
\end{align}
where \(C\) is a constant. At \(t=0\), \(\theta=0 \implies C=0\). So,
$$\theta(t)=2\sin^-1\left(\frac{v_0t}{4k}\right)$$
Cylindrical Polar Coordinate System

The unit vectors for plane polar coordinate system are
\begin{align}
&\hat{s} = \cos\phi\hat{i} + \sin\phi\hat{j}\\
&\hat{\phi} = -\sin\phi\hat{i} + \cos\phi\hat{j} \\
&\hat{k} \\
\end{align}
As \(\hat{s}\) and \(\hat{\phi}\) depend on \(\phi\), which may not be constant, they may have non-zero derivative, unlike the \(\hat{i}\) and \(\hat{j}\) in Cartesian coordinate system
\begin{align}
\dot{\hat{s}} &= -\dot{\phi}\sin\phi\hat{i} + \dot{\phi}\cos\phi\hat{j} = \dot{\phi}\hat{\phi} \\
\dot{\hat{\phi}} &= -\dot{\phi}\cos\phi\hat{i} - \dot{\phi}\sin\phi\hat{j} = -\dot{\phi}\hat{s}\\
\end{align}
The position vector \(\textbf{r}(t)\) is given by
$$\textbf{r}(t) = s(t)\hat{s} + z(t)\hat{k}$$
The velocity is
$$\textbf{v}(t) = s(t)\dot{\hat{s}} + \dot{s}(t)\hat{s} + \dot{z}\hat{k} = \dot{s}\hat{s} + s\dot{\phi}\hat{\phi} + \dot{z}\hat{k}$$
The acceleration is
\begin{align}
\textbf{a}(t) &= \ddot{s}\hat{s} + \dot{s}\dot{\phi}\hat{\phi} + (s\ddot{\phi} + \dot{s}\dot{\phi})\hat{\phi} + s\dot{\phi}(-\dot{\phi}\hat{s}) + \ddot{z}\hat{k}\\
&= (\ddot{s} - s\dot{\phi}^2)\hat{s} + (2\dot{s}\dot{\phi} + s\ddot{\phi})\hat{\phi} + \ddot{z}\hat{k}
\end{align}
Spherical Coordinate System
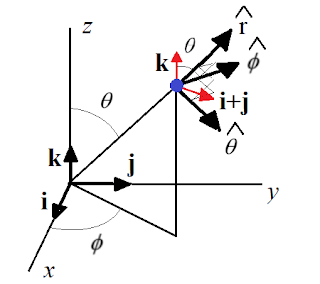
The unit vectors for spherical coordinate system are
\begin{align}
\hat{r} &= \sin\theta\cos\phi\hat{i} + \sin\theta\sin\phi\hat{j} + \cos\theta\hat{k}\\
\hat{\theta} &= -\cos\theta\cos\phi\hat{i} + \cos\theta\sin\phi\hat{j} -\sin\theta\hat{k} \\
\hat{\phi} &= \sin\phi\hat{i} + \cos\phi\hat{j} \\
\end{align}
As they depend on \(\phi\) and \(\theta\), which may not be constant, they may have non-zero derivative, unlike the \(\hat{i}\), \(\hat{j}\) and \(\hat{k}\) in Cartesian coordinate system
\begin{align}
\dot{\hat{r}} &= (\dot{\theta}\cos\theta\cos\phi-\dot{\phi}\sin\theta\sin\phi)\hat{i} + (\dot{\theta}\cos\theta\sin\phi + \dot{\phi}\sin\theta\cos\phi)\hat{j} -\dot{\theta}\sin\theta\dot{k} = \dot{\theta}\hat{\theta} + \dot{\phi}\sin\theta\hat{\phi} \\
\dot{\hat{\theta}} &= -\dot{\theta}\hat{r} + \dot{\phi}\cos\theta\hat{\phi}\\
\dot{\hat{\phi}} &= -\dot{\phi}\sin\theta\hat{r} - \dot{\phi}\cos\theta\hat{\phi}
\end{align}
The position vector \(\textbf{r}(t)\) is given by
$$\textbf{r}(t) = r(t)\hat{r}$$
The velocity is
$$\textbf{v}(t) = r(t)\dot{\hat{r}} + \dot{r}(t)\hat{r} = \dot{r}\hat{r} + r\dot{\phi}\sin\theta\hat{\phi} + r\dot{\theta}\hat{\theta}$$
The acceleration is
\begin{align}
\textbf{a}(t) = &(\ddot{r} - r\dot{\phi}^2\sin^2\theta - r\dot{\theta}^2)\hat{r}\\
&+(r\ddot{\theta} + 2\dot{r}\dot{\theta} - r\dot{\phi}^2\sin\theta\cos\theta)\hat{\theta}\\
&+(r\ddot{\phi}\sin\theta + 2\dot{r}\dot{\phi}\sin\theta + 2r\dot{\theta}\dot{\phi}\cos\theta) \hat{\phi} \\
\end{align}





Comments
Post a Comment